 AgoraVox Italia
AgoraVox Italiahttp://www.geosmartmagazine.it
Articoli
-
Dronitaly 2026: business, innovazione e ricerca a Bologna
13 febbraio, di RedazioneDronitaly 2026 torna a Bologna dall’11 al 13 marzo: imprese, ricerca e PA a confronto sui droni professionali.
Business, innovazione e ricerca
Dronitaly, su richiesta degli operatori, torna in primavera: l’undicesima edizione dell’unica manifestazione internazionale in Italia dedicata ai droni civili a uso professionale si terrà dall’11 al 13 marzo 2026 presso l’EX-GAM del Bologna Congress Center. La sede, caratterizzata da un ambiente di design accogliente e riservato, è pensata per favorire incontri mirati e opportunità di collaborazione.
Dronitaly 2026: un appuntamento di confronto per il settore
Organizzata da BolognaFiere Water&Energy in collaborazione con Mirumir, l’edizione 2026 prosegue il percorso avviato con l’evento speciale del 2025 presso il Centro Ricerche ENEA del Brasimone. Dronitaly si conferma occasione di incontro e confronto tra imprese, istituzioni, Pubbliche Amministrazioni e mondo della ricerca, grazie a un format che integra area espositiva, contenuti di approfondimento e networking qualificato.
Oltre 40 aziende e Hub Ricerca e Innovazione
L’area espositiva vedrà la partecipazione di oltre 40 aziende italiane e internazionali, con soluzioni dedicate ai principali ambiti di applicazione civile, individuati con il supporto del Comitato Tecnico Scientifico, anche in ottica B2B e B2G.
Nell’ambito di Dronitaly sarà realizzato l’Hub Ricerca e Innovazione, spazio dedicato a università, centri di ricerca, start-up e studenti, chiamati a presentare soluzioni basate sull’impiego dei droni in ambito professionale e civile.
Dronitaly 2026: programma e contributi istituzionali
Il programma convegnistico affronterà i principali ambiti applicativi dei droni civili professionali, dall’agro-forestale alla sicurezza, dalla progettazione al monitoraggio delle infrastrutture, fino alle attività di ricerca e soccorso. Particolare attenzione sarà dedicata alla gestione e integrazione dei dati, anche attraverso l’Intelligenza Artificiale, e l’integrazione dei droni nella logistica.
Sono previsti contributi di CNR, ISPRA e Ordine degli Ingegneri. Il CNR curerà tre giornate dedicate a “Droni e Ambiente: Ricerca, Applicazioni e Prospettive”, con focus su agro-forestale (11 marzo), geo-ambientale (12 marzo) e “Droni e Dati: gestione, sicurezza e reti del futuro” (13 marzo). ISPRA proporrà sessioni sugli UAS nel Sistema Nazionale per la Protezione Ambientale, mentre l’Ordine degli Ingegneri collaborerà al convegno “Droni nei Cantieri: Sicurezza, Monitoraggio, Ingegneria” (12 marzo).
Registrati all’evento
L’ingresso a Dronitaly 2026 è gratuito per i visitatori professionali, previa registrazione online.
Info: https://www.dronitaly.it/


(Fonte: BFWE)

Leggi anche:
- Droni nella Pubblica Amministrazione: innovazione e sicurezza
- Perdite idriche sotterranee: rilevamento fino a 40 metri
- Monitoraggio agricolo con droni: il nuovo progetto Agea-Avepa
- Dronitaly 2024: manifestazione di riferimento nel mercato dei droni
L'articolo Dronitaly 2026: business, innovazione e ricerca a Bologna proviene da Geosmart Magazine.
-
Userbot 3.0: gli agenti AI che collaborano con le imprese
12 febbraio, di Dario SchimizziGli Userbot 3.0, agenti AI che collaborano con le imprese, segnano un’evoluzione decisiva nell’adozione dell’intelligenza artificiale in azienda. La piattaforma Userbot di smeup passa dal concetto di semplice chatbot a un modello avanzato di agenti AI che collaborano, prendono decisioni e si integrano nei sistemi operativi delle imprese. Un approccio che permette alle organizzazioni di trasformare processi, aumentare l’efficienza e adottare l’AI in modo sicuro, misurabile e realmente operativo.
Le imprese italiane stanno attraversando una fase in cui la semplice automazione delle risposte non è più sufficiente. Userbot 3.0 rappresenta un cambio di paradigma nell’adozione dell’intelligenza artificiale, trasformando il concetto di chatbot in una collaborazione strutturata tra agenti autonomi, coordinati e integrabili nei processi aziendali. La piattaforma, sviluppata all’interno del gruppo smeup, introduce un modello operativo che mette l’AI al servizio dell’azione concreta, della governance e della scalabilità.
Userbot 3.0 e la nuova era dell’Agentic AI
Userbot 3.0 nasce per superare quattro ostacoli fondamentali all’integrazione reale dell’intelligenza artificiale nei processi aziendali: governance, sicurezza, continuità operativa e capacità di intervenire direttamente nei flussi di lavoro.
La piattaforma garantisce tracciabilità e spiegabilità delle decisioni, elemento essenziale per la governance dell’AI. L’integrazione nativa con ERP, CRM, database e sistemi documentali consente agli agenti non solo di rispondere, ma di agire: aggiornare ordini, aprire ticket, creare record, effettuare analisi e produrre output strutturati.
Sul fronte sicurezza, l’approccio GDPR by design e i meccanismi avanzati di osservabilità permettono di monitorare ogni passaggio decisionale e assicurare la compliance. La natura SaaS della soluzione, con infrastruttura ridondata e aggiornamenti continui, tutela la continuità operativa delle aziende, rendendo Userbot 3.0 adatto sia alle PMI sia alle realtà enterprise.
Userbot 3.0 e la costruzione di un team di agenti AI specializzati
Cuore della nuova versione è la possibilità di costruire e governare una vera squadra di agenti AI autonomi, ognuno focalizzato su un compito specifico. La logica si articola in cinque passaggi chiari e operativi.
1. Connessione ai dati
L’agente si collega esclusivamente a fonti aziendali certificate, garantendo risposte accurate ed evitando fenomeni di allucinazione. Documenti, ERP e CRM diventano l’unica base informativa autorizzata.
2. Personalità e ruolo
Ogni agente viene definito in base a tono di voce, creatività, priorità e limiti operativi, modellando capacità e comportamento secondo le esigenze aziendali.
3. Formazione del team
Con l’Agent Builder visuale si costruisce l’organizzazione agentica, stabilendo scambi informativi e flussi decisionali tra i vari agenti.
4. Integrazione con i sistemi aziendali
La squadra si connette a ERP, CRM, ticketing e altri sistemi, entrando pienamente nei processi. Gli agenti possono eseguire task reali: aggiornare dati, generare documenti, classificare richieste, avviare workflow.
5. Supervisione e ottimizzazione
Una dashboard avanzata mostra performance, interazioni e reasoning, rendendo ogni decisione trasparente e monitorabile.
Le tipologie disponibili includono Router Agent, Condition Agent, Code Agent per l’esecuzione in tempo reale di codice Python e Vision Agent per l’interpretazione di immagini e PDF.
Userbot 3.0 come leva strategica per Digital Transformation e AI Governance
Secondo Antonio Giarrusso, Head of AI di smeup, l’arrivo di Userbot 3.0 apre l’era degli agenti AI capaci di collaborare, ragionare e agire con piena integrazione nei sistemi aziendali. Il risultato è un miglioramento concreto della produttività, della qualità dei processi e della capacità delle imprese di generare valore dai propri dati.
La piattaforma si inserisce nella visione più ampia di smeup, che accompagna le aziende nei percorsi di trasformazione digitale valorizzando processi, dati e conoscenza interna attraverso soluzioni affidabili e progettate per il contesto europeo.
Fonte: Doppia Elica – an SD Worx Company
Leggi anche:
- I migliori Chatbot AI 2025: confronto ChatGPT, Claude, Gemini e altri
- DeepSeek: guida all’installazione del modello AI open source
- NVIDIA ChatRTX: la chatbot che rivoluziona l’assistenza virtuale
L'articolo Userbot 3.0: gli agenti AI che collaborano con le imprese proviene da Geosmart Magazine.
-
ArcGIS Knowledge Graph: un modo diverso di studiare il territorio
12 febbraio, di RedazioneApprofondisci la graph analysis per studiare i fenomeni tramite entità. Con ArcGIS knowledge graph impara la differenza tra nodi ed archi, entità e relazioni.
ArcGIS Knowledge Graph: evento Esri Italia
Il 18 febbraio alle ore 11:00 Esri Italia propone un approfondimento online dedicato ad ArcGIS Knowledge Graph a cura di Gerardo De Rubeis, Solution Architect di Esri Italia, dal titolo “ArcGIS Knowledge Graph: un modo diverso di studiare il territorio”.
Cos’è la graph analysis
Esri inserisce nel vasto ecosistema di ArcGIS la Graph Analysis, una tecnologia performante in termini di database, algoritmi e modelli che ci permette di studiare i fenomeni tramite “entità”, quali persone, mezzi, strutture, aziende, eventi, fenomeni, definendo la connessione tra le stesse: la “relazione”.
La graph analysis (o analisi dei grafi/network analysis) è un insieme di tecniche analitiche utilizzate per interpretare e studiare le relazioni e le connessioni tra entità all’interno di un set di dati strutturato come un grafo.
A differenza dell’analisi dati tradizionale, che spesso si concentra su singole righe o colonne, la graph analysis si concentra sulla struttura delle relazioni (collegamenti) tra i dati.
I dati nei grafi sono modellati attraverso due componenti principali:
- Nodi (Nodes/Entities): Rappresentano gli oggetti o entità (es. persone, computer, prodotti, transazioni).
- Archi (Edges/Relationships): Rappresentano le connessioni, le interazioni o le relazioni tra i nodi (es. “amico di”, “ha acquistato”, “collegato a”, “flusso di denaro”).
ArcGIS knowledge graph: a cosa serve la graph analysis
- Rilevamento Frodi (Fraud Detection): Identificare comportamenti sospetti, come reti di riciclaggio di denaro o “money mules” che condividono gli stessi indirizzi o numeri di telefono.
- Social Network Analysis: Analizzare le connessioni tra le persone, trovare influencer, o raccomandare amici/interessi su piattaforme come Facebook e LinkedIn.
- Ottimizzazione della Supply Chain: Identificare colli di bottiglia o percorsi ottimali per la distribuzione delle merci.
- Cybersecurity: Analizzare i percorsi di rete per anticipare minacce, phishing o tracciare attacchi informatici.
- Knowledge Graph (Motori di ricerca): Connettere informazioni fattuali note per migliorare i risultati dei motori di ricerca, come il Knowledge Graph di Google.
- Motori di Raccomandazione (Recommendation Engines): Suggerire prodotti basandosi su relazioni complesse (es. “clienti simili a te hanno acquistato…”).
Questi dati e modelli vengono elaborati in chiave geografica, quindi rappresentati in mappa.
Vantaggi
I vantaggi sono molteplici e l’analisi previsionale, lo studio di concentrazione e percorsi logici, non si limitano più alla sola “posizione” ma si arricchiscono di innumerevoli variabili.
La graph analysis è fondamentale per identificare modelli nascosti, anomalie o strutture che i database tradizionali non riescono a rilevare:
- Rivelazione di relazioni complesse: Permette di vedere connessioni indirette, ad esempio, collegando due nodi attraverso diversi “salti” (hops).
- Scoperta di pattern nascosti: Individua anomalie e trend in grandi dataset che la statistica classica potrebbe perdere.
- Visualizzazione immediata: Facilita la comprensione delle relazioni tramite rappresentazioni visuali (nodi e archi).
- Machine Learning potenziato: I grafi forniscono il contesto necessario per migliorare l’accuratezza dei modelli di AI (GraphRAG).
La graph analysis è cruciale nelle moderne analisi di Big Data, aiutando le organizzazioni a prendere decisioni più informate basate sul contesto delle connessioni.
Non perdere l’occasione, partecipa all’approfondimento online del 18 febbraio alle 11:00.
Gli eventi online di Esri Italia sono gratuiti, previa iscrizione.
(Fonte: Esri Italia)
Leggi anche:
- Le immagini nei GIS moderni: webinar gratuito di Esri Italia
- Conferenza Esri Italia 2026: aperta la Call for Paper
- Esri Italia presenta in anteprima la Photorealistic 3D Basemap
- Informazione ambientale 2025: il forum con Esri Italia
L'articolo ArcGIS Knowledge Graph: un modo diverso di studiare il territorio proviene da Geosmart Magazine.
-
Positioning: sensor fusion smoothing per traiettorie più precise
10 febbraio, di RedazioneSensor fusion smoothing migliora la precisione della traiettoria in post-processing eliminando salti e riducendo l’incertezza di posizionamento.
Sensor fusion smoothing: che cos’è?
La sensor fusion è un termine generale che indica l’insieme degli approcci che utilizzano i dati provenienti da più sensori per stimare lo stato di un sistema. È ampiamente utilizzata nel posizionamento e nella navigazione, così come in tutti quei campi che richiedono una stima precisa e affidabile della posizione, ad esempio la robotica o l’agricoltura di precisione.
Si consideri, ad esempio, un robot autonomo o un veicolo a guida autonoma: per garantirne un comportamento sicuro è necessario disporre della stima più affidabile possibile della sua posizione.In genere, sistemi di questo tipo dispongono di più di una sorgente di informazione per il posizionamento. Un robot mobile che opera all’aperto, per esempio, può essere equipaggiato con un ricevitore GNSS, un’IMU (sensore inerziale), un magnetometro, encoder sulle ruote, un sistema LIDAR e così via. Tutti questi sensori contribuiscono al posizionamento, garantendone la continuità e fornendo la migliore soluzione possibile in condizioni operative diverse.
Il punto fondamentale è che nessuno dei dispositivi menzionati è perfetto: ciascuno è soggetto a differenti tipologie di errore, e l’uso combinato di più sensori è la chiave per ottenere una stima di posizione robusta e affidabile.Esistono numerosi approcci alla sensor fusion; tra i più diffusi si possono citare l’ottimizzazione su grafo e il filtraggio di Kalman. Il filtro di Kalman classico è ampiamente utilizzato per sistemi dinamici lineari, mentre per sistemi non lineari sono state sviluppate varianti più avanzate, come il filtro di Kalman esteso (EKF) e il filtro di Kalman unscented (UKF).
Salti della soluzione nella fusione di dati multi-frequenza
Gli algoritmi di sensor fusion possono essere eseguiti sia in tempo reale sia in post-processing, con caratteristiche e applicazioni differenti. Il posizionamento in tempo reale è necessario ogni volta che la stima di posizione deve essere disponibile immediatamente per la navigazione e per garantire la sicurezza, come accade nella maggior parte delle applicazioni legate ai trasporti. Il post-processing, invece, è fondamentale quando la traiettoria deve essere ulteriormente raffinata. Questo avviene spesso in ambiti come il rilievo e la fotogrammetria, dove i dati acquisiti devono essere accuratamente georeferenziati.
La sensor fusion in tempo reale viene tipicamente eseguita a bordo del dispositivo, mentre il post-processing può essere effettuato successivamente su una piattaforma separata, utilizzando le registrazioni dei sensori raccolte dal veicolo o dal sistema.
Quando un algoritmo come il filtro di Kalman opera in tempo reale, a ogni istante utilizza esclusivamente i dati disponibili in quel momento. Poiché i diversi sensori forniscono dati a frequenze differenti, non tutte le misure sono disponibili a ogni passo dell’algoritmo. Un caso tipico è la fusione di dati GNSS e IMU: mentre l’IMU fornisce misure ad alta frequenza (ad esempio 100 Hz o superiore), il GNSS opera spesso a 1 Hz, arrivando al massimo a 10–20 Hz nelle applicazioni più critiche.
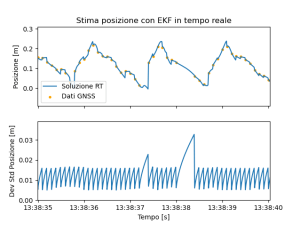
Di conseguenza, ogni aggiornamento GNSS può introdurre una correzione significativa nella stima della posizione, causando inevitabilmente un salto della soluzione in tempo reale, come illustrato in Fig. 1. il grafico della deviazione standard della posizione, che rappresenta l’errore stimato internamente dall’algoritmo. In assenza di misure GNSS, l’incertezza cresce a causa dell’accumulo degli errori inerziali; quando arriva una correzione GNSS, l’incertezza si riduce nuovamente. Durante interruzioni prolungate del segnale GNSS, l’incertezza aumenta rapidamente.
Questo comportamento è accettabile per evitare collisioni e garantire la navigazione in tempo reale. Tuttavia, se il robot è dotato di una camera o di un LIDAR i cui dati devono essere utilizzati per applicazioni di fotogrammetria o ricostruzione 3D, diventa essenziale disporre di una traiettoria il più possibile liscia e precisa.
Smoothing della traiettoria: una soluzione in post-processing
Poiché la ricostruzione 3D su larga scala viene comunque eseguita in post-processing, non vi sono particolari limitazioni nel raffinare ulteriormente anche la stima della traiettoria dopo l’acquisizione dei dati. Quando un algoritmo opera in tempo reale, infatti, può utilizzare esclusivamente le informazioni passate: è chiaramente impossibile conoscere le misure future. Al contrario, quando l’intera sequenza di dati è disponibile, la soluzione può essere “smussata” (smoothed) utilizzando sia le informazioni passate sia quelle future.
L’intuizione alla base di questo processo è simile all’esecuzione dello stesso algoritmo sia in avanti sia all’indietro nel tempo, combinando poi le stime ottenute pesandole in base alle rispettive covarianze. L’algoritmo reale è in effetti più complesso, specialmente per sistemi non lineari come quelli di navigazione inerziale. Una tecnica comunemente utilizzata per il post-processing dei filtri di Kalman è lo smoothing di Rauch–Tung–Striebel (RTS), dal nome degli autori che lo hanno sviluppato.
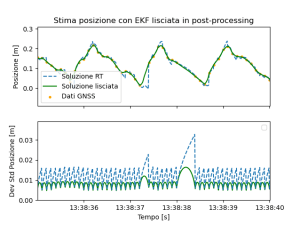
L’aspetto fondamentale di questo approccio è che, durante l’elaborazione con il filtro di Kalman, devono essere salvati tutti gli stati e le matrici di covarianza (sia predette sia filtrate). Questo comporta un certo costo in termini di memoria, ampiamente compensato dalla qualità della soluzione ottenuta. In Fig. 2 è mostrata la stessa serie temporale dopo l’applicazione dello smoothing RTS. Si può notare come la soluzione smussata attraversi in modo continuo i punti GNSS, eliminando completamente i salti. Inoltre, osservando il grafico della deviazione standard, si nota che, invece di crescere monotonicamente fino alla successiva correzione, l’incertezza assume un andamento simmetrico tra due aggiornamenti GNSS, con un massimo a metà intervallo, comportamento che risulta intuitivamente corretto.
Sensor fusion smoothing: è possibile ottenere questo risultato in tempo reale?
Questa è una domanda complessa. Molti utenti preferirebbero disporre di una soluzione liscia direttamente in tempo reale, ma ciò introduce notevoli difficoltà dal punto di vista computazionale. Gli algoritmi di smoothing classici richiedono infatti un’elaborazione all’indietro a partire da un istante finale, il che rende impossibile una vera implementazione in tempo reale.
In linea di principio, si potrebbe considerare l’istante corrente come un punto finale temporaneo ed eseguire uno smoothing all’indietro a ogni iterazione. Tuttavia, ciò richiederebbe di rielaborare un numero crescente di stati passati, rendendo rapidamente l’approccio computazionalmente insostenibile.
Un compromesso pratico consiste nell’applicare il sensor fusion smoothing su una finestra temporale finita, mantenendo un numero fisso di epoche passate ed eseguendo l’elaborazione all’indietro solo all’interno di questa finestra. Con risorse computazionali sufficienti, questo tipo di fixed-lag smoothing può essere implementato in tempo reale e rappresenta spesso un buon compromesso tra latenza, qualità della soluzione e costo computazionale.
(Fonte: Gter)
Leggi anche:
- Smartphone posititoning: sfide nel processamento di dati GNSS
- Factor Graph Optimization nel posizionamento GNSS ad alta precisione
- Accordo NASA e ASI per il primo sistema di navigazione GNSS sulla Luna
- Navigazione e posizionamento GNSS: i segnali sono tutti uguali?
L'articolo Positioning: sensor fusion smoothing per traiettorie più precise proviene da Geosmart Magazine.
-
Innovate2BUILD 2026: rivedi l’evento on demand
10 febbraio, di RedazioneInnovate2BUILD 2026 è disponibile on demand: rivedi sessioni, keynote e casi reali su AI, BIM e innovazione nel settore AECO.
Innovate2BUILD 2026 on demand
L’evento si è concluso, ma i contenuti e gli insight condivisi durante l’evento restano disponibili in modalità on demand. Il summit ha riunito la community internazionale AECO per analizzare le principali trasformazioni in atto nel settore delle costruzioni.
Nel corso delle diverse sessioni, esperti e professionisti hanno approfondito le tecnologie e i processi che stanno ridefinendo il modo di progettare, costruire e gestire le opere.
AI e automazione nei processi progettuali
L’intelligenza artificiale e l’automazione sono state presentate come leve strategiche per aumentare efficienza, qualità e rapidità nelle fasi di progettazione.
BIM e Data Management per il settore AECO
Grande attenzione è stata dedicata al BIM e alla gestione dei dati, elementi centrali per una pianificazione più consapevole e per decisioni basate su informazioni affidabili e strutturate.
Workflow digitali per collaborazione e produttività
I workflow digitali consentono di migliorare la collaborazione tra team multidisciplinari, riducendo errori e tempi di coordinamento lungo l’intero ciclo di vita del progetto.
Innovate2BUILD 2026 e l’innovazione applicata
Uno degli aspetti distintivi è stato il focus su progetti reali e casi d’uso concreti. Attraverso keynote e sessioni pratiche, architetti, ingegneri e professionisti delle costruzioni hanno condiviso soluzioni già adottate nel lavoro quotidiano, dimostrando l’impatto misurabile delle tecnologie digitali.
Come accedere alle sessioni on demand
Se non hai potuto seguire tutte le sessioni in diretta o desideri approfondire i temi più rilevanti per i tuoi progetti, puoi accedere gratuitamente alle registrazioni dell’evento e rivederle quando preferisci.
Accedi alle sessioni on demand di Innovate2BUILD 2026
(Fonte: GRAITEC)
Leggi anche:
- Olimpiadi Milano-Cortina 2026: strutture in acciaio firmate GRAITEC
- AI ed edilizia digitale: le sessioni di Innovate2BUILD 2026
- Digitalizzazione settore AECO e BIM: strategie e tecnologie
- Summit digitale AECO Innovate2BUILD: l’evento globale di riferimento
L'articolo Innovate2BUILD 2026: rivedi l’evento on demand proviene da Geosmart Magazine.
... | 105 | 110 | 115 | 120 | 125 | 130 | 135 | 140 | 145 |...